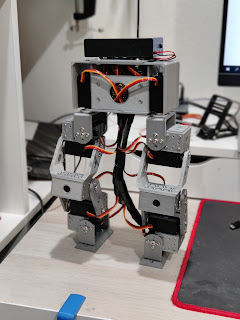
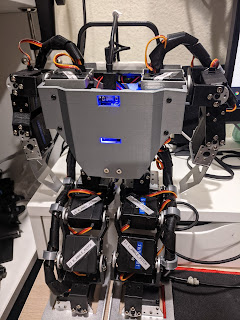
BASE.001(V3) 2023 Update.
After putting BASE.001 aside for some AI fun, there is some new updates to BASE.001 (V3). Firstly, IT WALKS! I finally took the time to replicate George Chiou's MiniPlan V5 walking gait for BASE.001. While it is still highly unstable, BASE.001 is doing what it was designed to do: to walk and experiment with gaits. Secondly, the hip is getting redesigned at the moment for some better bracing of the servos and joints. Also the connectors will be redesigned so repair would be easier to use. Currently modeling and printing the new parts, pictures in next post, hopefully! [Original post on Aug 20, 2023 7:58PM PST on Blogger]
.jpg)